Относительные моточасы
Тип датчика Относительные моточасы позволяет рассчитывать время работы двигателя относительно его оборотов.
Для создания датчика относительных моточасов нам предварительно необходимо создать датчик с типом Обороты двигателя и датчик высчитывающий Коэффициент моточасов.
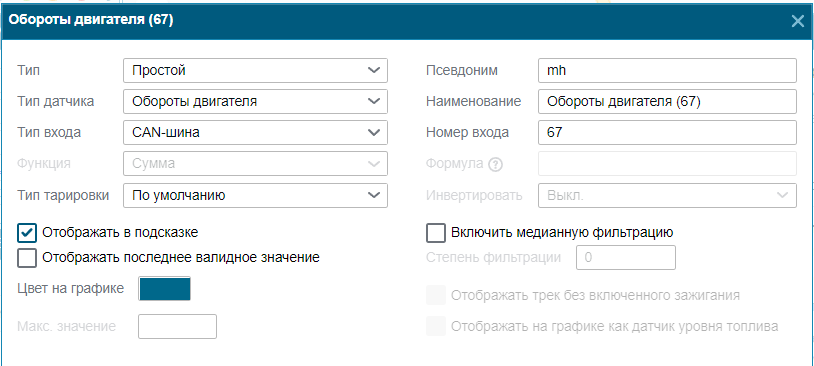
Обороты двигателя
Для создания датчика необходимо указать тип Простой, тип датчика Обороты двигателя, указать тип и номер входа, откуда поступают значения оборотов двигателя, и задать псевдоним. В нашем примере псевдоним указан как mh.
Коэффициент моточасов
Для расчета коэффициента моточасов создается датчик с типом Виртуальный, типом датчика Произвольный, функцией Выражение, типом тарировки Таблица.
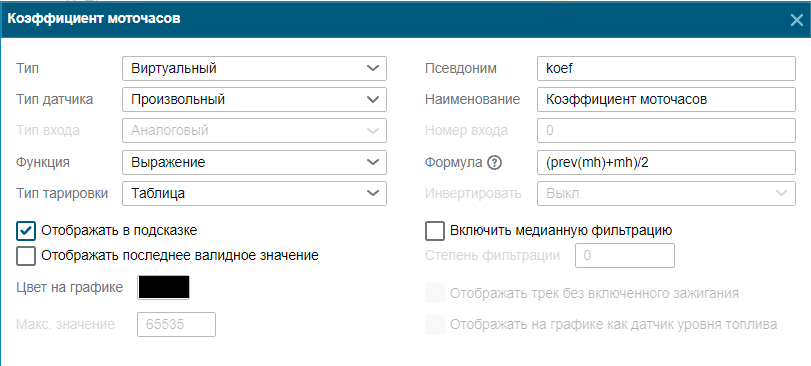
В формуле указывается следующее выражение: (prev(mh)+mh)/2, где prev() - функция, позволяющая обратиться к предыдущему сообщению, mh - псевдоним датчика оборотов двигателя. Данная формула позволяет вычислить среднее значение оборота двигателя между двумя последними сообщениями. Таким образом нивелируются скачки оборотов двигателя в момент создания сообщения. Задаем псевдоним, в нашем случае koef.
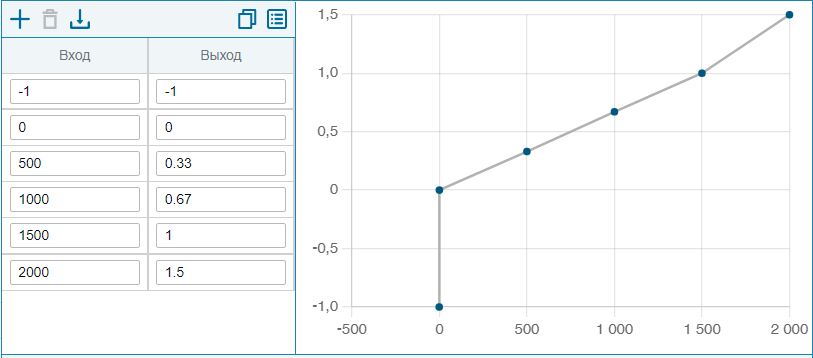
После создаем тарировку, которая позволит нам соотнести полученную из формулы величину оборотов двигателя со значением коэффициента.
Относительные моточасы
Для создания датчика необходимо указать его тип как Виртуальный, тип датчика Относительные моточасы, функция Выражение, тип тарировки оставить По умолчанию.
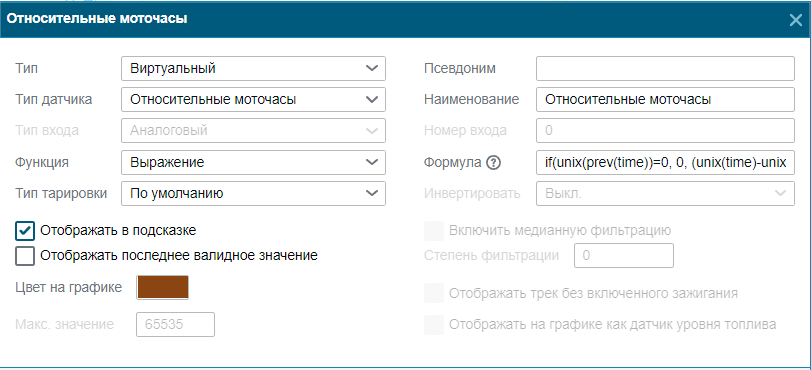
В формуле указать следующее выражение: if(unix(prev(time))=0, 0, (unix(time)-unix(prev(time)))*koef), где if( , , ), unix(), prev() - функции описанные в этой статье. time - время создания сообщения, koef - псевдоним датчика Коэффициент моточасов. В формуле вычисляется время между сообщениями, к которому применяется коэффициент моточасов. В итоге получаем значение моточасов с учетом высоты оборотов двигателя.